Omni-directional vehicle
Challenge: Design and build a human powered omni-directional vehicle, capable of simultaneous orientation and travel in any direction.
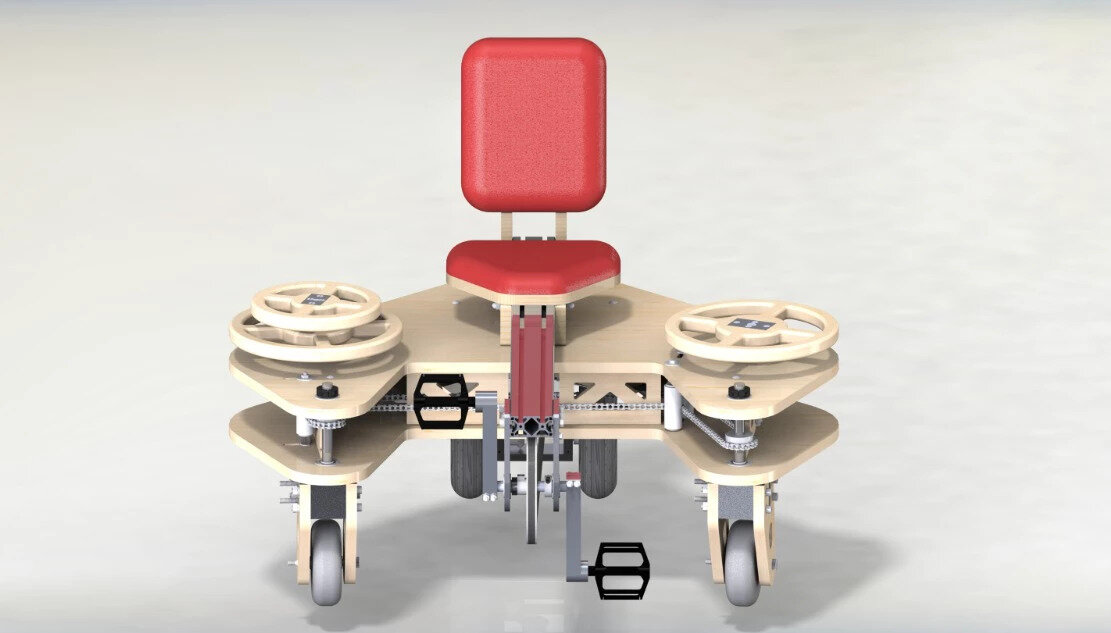
Solution: Our final design, “omnivore”, consisted of:
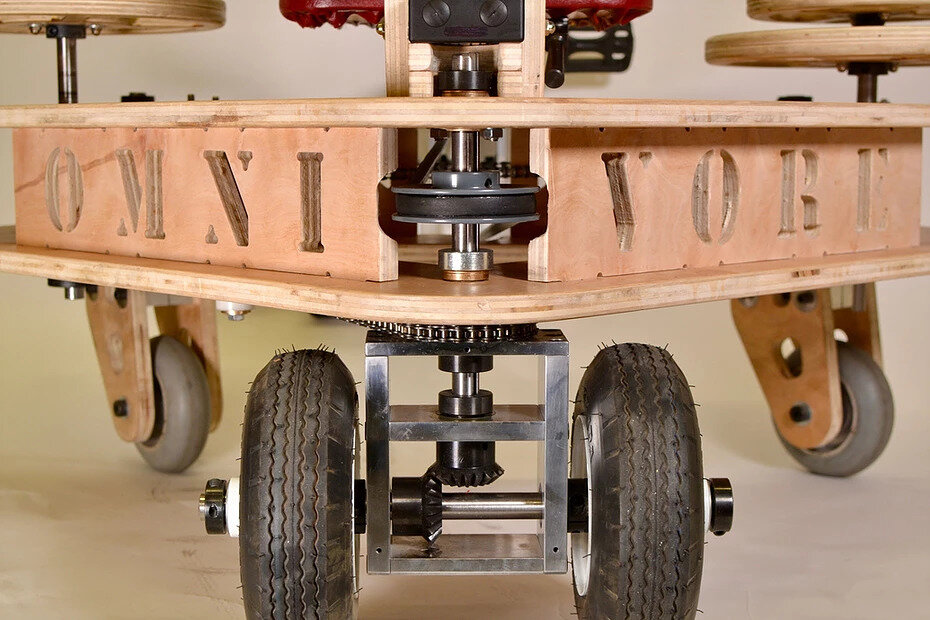
1) A sandwiched chassis that contains and protects power and steering components, using two parallel plywood boards held together with a tongue and groove snap fit.
2) A pedal-powered drive train that powers a drive hub at the back using a 90 degree twisted V-belt
3) A coaxial power and steering drive hub
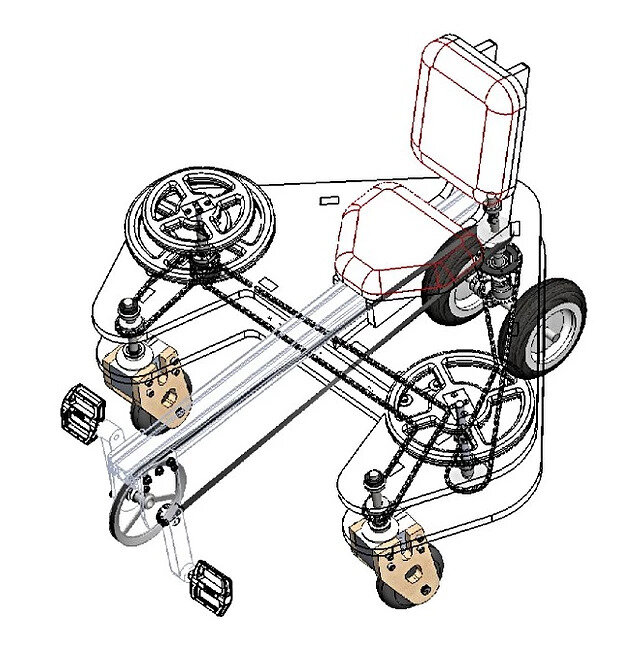
4) Coaxial steering wheels (placed on top of each other) connected to two front trailing links
5) An ergonomically adjustable seat for easy use my all team members
Logistics: 10 weeks in team of 5
My Role: Brainstormed and sketched numerous concepts during ideation phase; in charge of developing and modeling component 4; helped manufacture components as part of team
Lessons learned: CSWA certified in Solid Works, FEA Analysis, Use of Solid-works simulation tools, mechanical design and manufacture, further practice in 3-axis CNC milling, CNC lathes and ShopBot

Test Drive

CAD model of component 4 showing coaxial steering wheel and a trailing link